What’s Wrong with Serial Ports?
Because serial ports are asynchronous (no clock data is transmitted), devices using them must agree ahead of time on a data rate. The two devices must also have clocks that are close to the same rate, and will remain so–excessive differences between clock rates on either end will cause garbled data.
Also bus contention and data rate is an issue
Also bus contention and data rate is an issue
Serial Peripheral Interface (SPI)
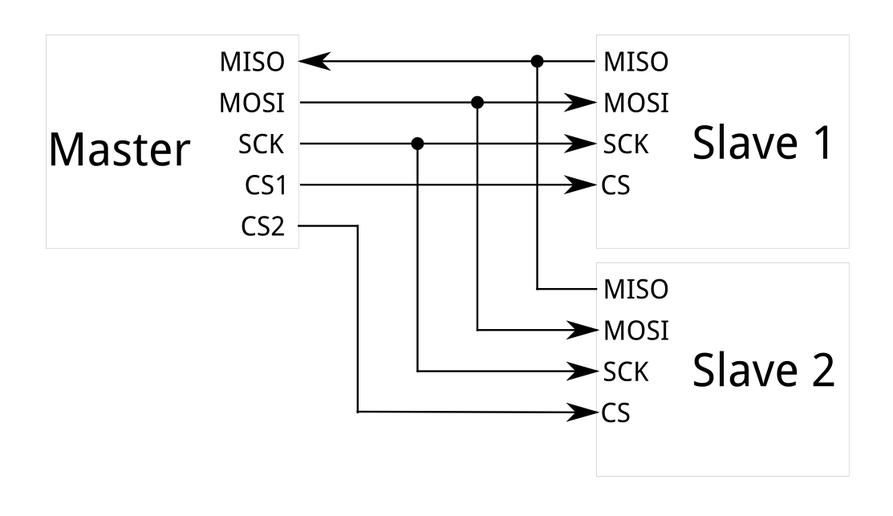
- Serial Peripheral Interface (SPI) is an interface bus commonly used to send data between microcontrollers and small peripherals such as shift registers, sensors, and SD cards. It uses separate clock and data lines, along with a select line to choose the device you wish to talk to.
- SPI works in a slightly different manner than RS-422 and RS-485.
- It’s a “synchronous” data bus, which means that it uses separate lines for data and a “clock” that keeps both sides in perfect sync.
- The clock is an oscillating signal that tells the receiver exactly when to sample the bits on the data line. This could be the rising (low to high) or falling (high to low) edge of the clock signal; the datasheet will specify which one to use.
- When the receiver detects that edge, it will immediately look at the data line to read the next bit (see the arrows in the below diagram). Because the clock is sent along with the data, specifying the speed isn’t important, although devices will have a top speed at which they can operate (We’ll discuss choosing the proper clock edge and speed in a bit).
- One reason that SPI is so popular is that the receiving hardware can be a simple shift register. This is a much simpler (and cheaper!) piece of hardware than the full-up UART (Universal Asynchronous Receiver / Transmitter) that asynchronous serial requires.
Advantages of SPI:
- It’s faster than asynchronous serial
- The receive hardware can be a simple shift register
- It supports multiple slaves
- It requires more signal lines (wires) than other communications methods
- The communications must be well-defined in advance (you can’t send random amounts of data whenever you want)
- The master must control all communications (slaves can’t talk directly to each other)
- It usually requires separate SS lines to each slave, which can be problematic if numerous slaves are needed.
I2C Bus
- The I2C bus was designed by Philips in the early ’80s to allow easy communication between components which reside on the same circuit board. Philips Semiconductors migrated to NXP in 2006.
- The Inter-integrated Circuit (I2C) Protocol is a protocol intended to allow multiple “slave” digital integrated circuits (“chips”) to communicate with one or more “master” chips.
- Like the Serial Peripheral Interface (SPI), it is only intended for short distance communications within a single device. Like Asynchronous Serial Interfaces (such as RS-232 or UARTs), it only requires two signal wires to exchange information.
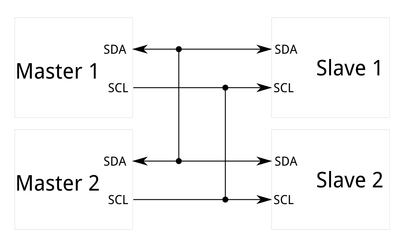
- I2C requires a mere two wires, like asynchronous serial, but those two wires can support up to 1008 slave devices. Also, unlike SPI, I2C can support a multi-master system, allowing more than one master to communicate with all devices on the bus (although the master devices can’t talk to each other over the bus and must take turns using the bus lines).
- Data rates fall between asynchronous serial and SPI; most I2C devices can communicate at 100kHz or 400kHz. There is some overhead with I2C; for every 8 bits of data to be sent, one extra bit of meta data (the “ACK/NACK” bit, which we’ll discuss later) must be transmitted.
- The hardware required to implement I2C is more complex than SPI, but less than asynchronous serial. It can be fairly trivially implemented in software.
Most significant features include:
- Only two bus lines are required
- No strict baud rate requirements like for instance with RS232, the master generates a bus clock
- Simple master/slave relationships exist between all components
Each device connected to the bus is software-addressable by a unique address - I2C is a true multi-master bus providing arbitration and collision detection